手机质量检测——基于深度学习技术的弧面产品缺陷检测
2023-12-20 06:03:57 手机
弧形表面缺陷的检测,在图像检测领域一直是一项极具挑战的技术。
目前弧面边框缺陷检测在流水线上仍是采用人工质检员进行检测,人工检测缺点很明显:鲁棒性差,客观性差,自动化弱。
为了促进工业制造的自动化和智能化,针对人工质检的缺点和弧面边框缺陷种类多样、尺寸大小不一,本文基于深度学习方式对弧面边框缺陷智能检测进行研究。
背景
随着如今移动互联网大规模的发展,移动互联网上网人数极速激增,几乎每个人都能手持一部移动设备手机进行网上浏览,因此手机设备随之激增。
手机外壳是手机的一大组成,手机外观的边框好坏也是手机质量的一大量化标准,因此人们对手机外壳的质感提出了更好的要求。
手机外壳制造过程中会经过粗铣、精铣、抛光、喷砂、高光等十几道复杂工艺流程,弧面边框表面可能会产生凹痕、碰伤或细小裂纹,带有以上缺陷的机壳样品,属于不合格样品,需要进行后续的回炉再造。
在目前机壳生产组装工厂中,机壳的弧面边框是否有缺陷主要还是以人工检测为主,即在流水线上,有专门培训的质检员在高亮光的环境下,通过肉眼辨别弧形表面是否存在缺陷进行判断。
该检测方式存在以下几个显著缺点:
1) 质检员个人有特定要求,需要眼力好的年轻人。
2) 客观性差,每个质检员的评价标准并不统一
3) 鲁棒性差,质检员无法长时间在亮光下进行检测容易眼睛疲劳,为保持高水平的质量判断,需要轮流交班接棒
4) 效率低,一条流水线需要四五个质检员进行人工检测。
因此,采用基于深度学习技术对手机边框弧面缺陷检测进行研究,有助于工业制造的智能化发展。
难点
手机边框缺陷检测的难点主要有两方面。
第一是,如何获取成像清晰的边框缺陷终像,因为手机外壳的边框材质属于易反光材质,因此需要专门设计合适的灯箱和镜头位置布局。
第二是,手机外壳边框弧面缺陷类型多样,有碰伤、划痕、点状缺陷等等,分布在耳机口、充电口或者长短边弧面等不同的地方。
手机边框缺陷
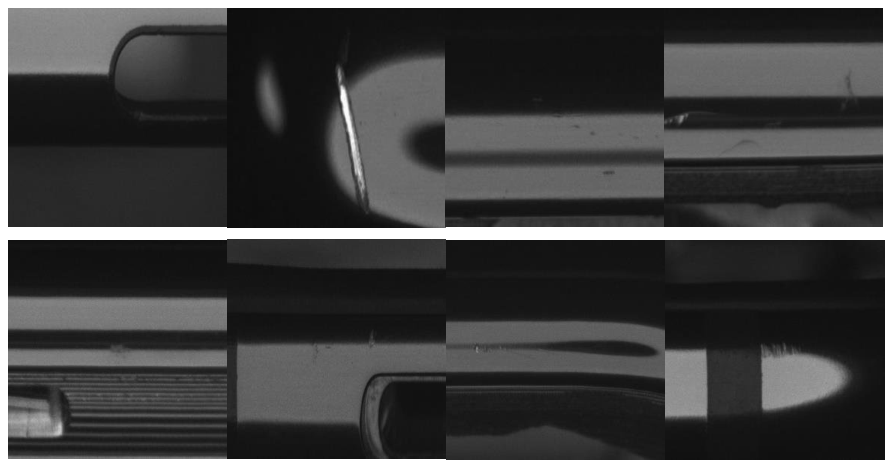
可以看到流水线上的机壳边框弧面的缺陷样品图像,有大面积的缺块碰伤、细小的凹痕、垂直深刻的竖纹,也有微小的细痕。缺陷种类繁多,各类的缺陷特征都不一致,形状各异,面积大小跨度也大,这对缺陷检测的算法设计是一个困难点。
传统的缺陷检测算法往往是针对某一类缺陷进行设计,对其他类型的缺陷往往不通用,容易出现高漏检率和高误检率的情况。如何设计出兼容多类缺陷特征的通用算法也是一个重大的困难点。
随着工业界开始不断出现完全采用深度学习方式,通过深度卷积神经网络实现表面缺陷检测,可以达到更高的检测精度。
检测
实现一个完整的自动化检测系统,除了算法需要实现之外,还需要完成一整套弧面缺陷智能检测系统,根据现有产品的特点进行调研,与需求方进行长期的沟通探讨,整理出以下的实现需求:
1)能够实时显示弧面边框图像,并且能够通过上位机对相机进行调焦、曝光、增益等操作;
2)能够通过上位机对下位机发送控制信号,对运动平台进行控制;
3)能够自动检测出弧面缺陷位置所在,并在软件主窗口展现出来,图片展示能够实现缩放拖拉查看;
4)能够存储产品的相关参数,并通过选择相应产品自动调节相机的间隔和运动的起始和终止距离;
硬件系统
硬件系统部分主要是合理设计运动部件、相机部件和光源部件的位置和联动,以便获取高质量的成像效果,便于后续算法设计和软件系统的实现。
产品检测的整体运动流程,产品水平放置,使其弧形面呈现在侧面,拍摄从侧面进行,产品从起始位
置开始做直线运动,一边运动一边采集图像。
由于产品的四条边和四个圆弧过渡角都需要检测,产品除了做直线运动,还要在过渡角出做回转动。
产品检测的运动过程是先直线运动,在产品前进的过程中用4个相机分两组分别采集两条侧边的圆弧面以及部分圆弧转角处的图像,在产品进行90度转角的同时,两组相机也进行平移运动,调整相机模组的拍摄距离和镜头的景深,然后让产品直线后退,在后退的过程中采集另外两条侧边弧面的图像,图像采集完成之后,产品直接退出,进行下一个产品的上料待检。
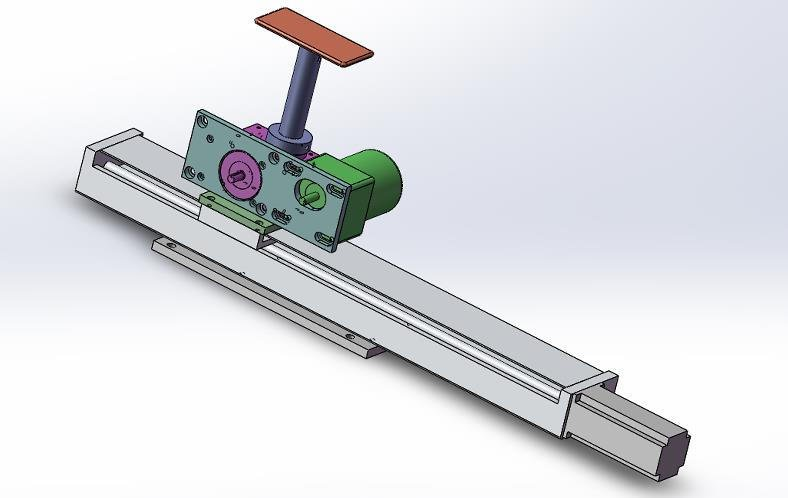
待检产品直线运动示意图
因被检测的产品表面为圆柱形弧面,因此至少需要两个相机进行拍摄。
工业相机的安装需根据待检产品的形状和尺寸,冬像的清晰度和景深的要求,调节拍摄的距离和拍摄的角度。另相机不仅可以进行调节,还可以随着运动模组进行水平方向的运动,进一步动态地控制拍摄距离。
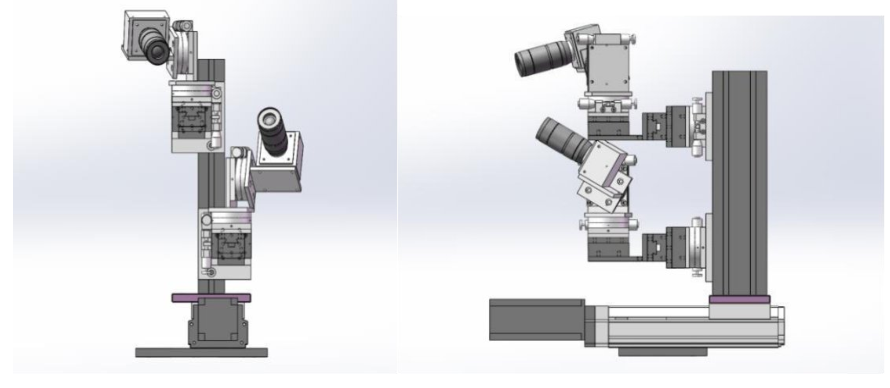
相机模块的正视图和俯视图
成像所使用的光源是一种用于均匀照明的穹顶光源。
对于弯曲和不平表面,可以通过光源的大张角进行成像,对于检测球型或曲面物体。由于穹顶光源的内壁可以通过反射将反射光分散,消除弧形表面存在大部分的不均匀反光。
穹顶光源特点:1)发出的光通过半球型内壁的反射形成散射照明光,实现对弧形金属表面实现均匀的照明;2)穹顶光源覆盖全波长范围,主要应用于弧形表面缺陷检测或不平坦表面检测。
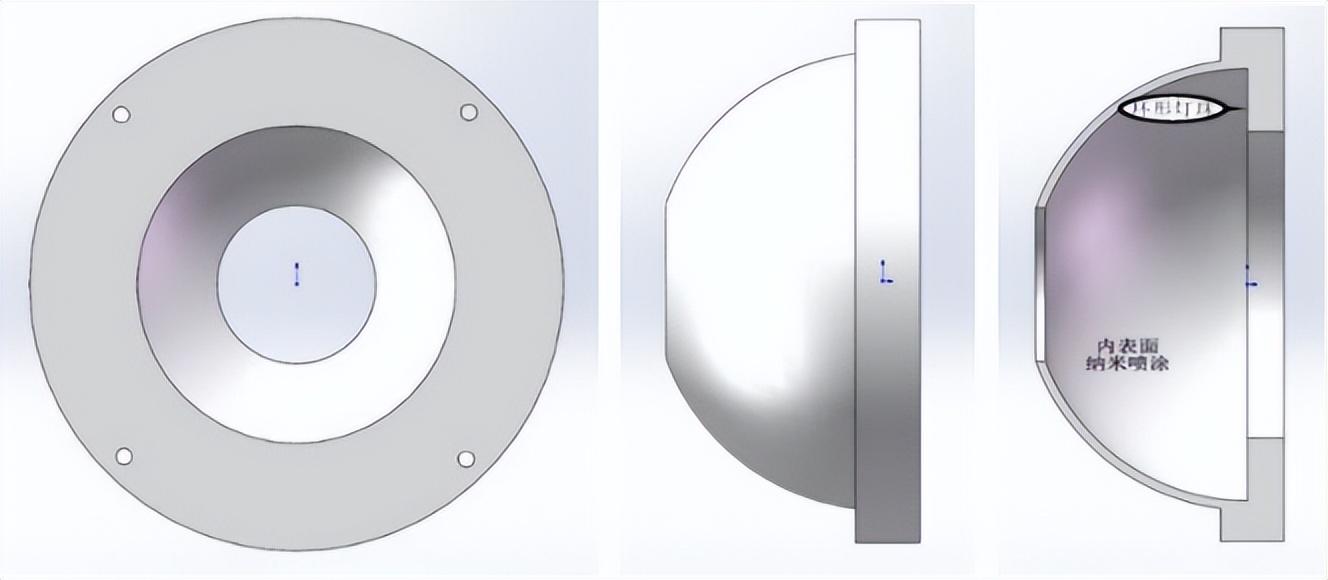
穹顶光源正视图/侧视图
如何选择合适的AI检测平台
由于产品缺陷检测是生产线上应用的一个实时检测系统,所以该系统具有较强的实时、快速性,因此需要非常大的图像数据量。
为了提高系统处理速度,除了采用比较高性能的硬件以外,还需要在软件运算方式和运算速度方面来考虑问题。
软件系统在接受到硬件系统所采集的图像后, 对所获产品表面图像进行处理完成检测与缺陷分类。该过程中,图像处理关键步骤的图像及缺陷检测结果会实时显示在交互界面上,并保存至生产日志。与此同时,检测过程中,计时与计数信息同步更新,显示在交互界面上,并保存至生产日记。
国内做机器视觉系统的有很多,如何选择成为头疼的问题,今天重点为大家讲述选择机器视觉软件的几个关键点。
机器视觉软件选型要点
1、图像预处理
大部分的图像处理软件提供预处理算法,所以需要比较其提供的丰富程度,效率等。
2、易于编程和操作
简单直观的图形界面是易于使用和设置的关键。当今机器视觉产品的主要区别在于它们的图形界面。界面应根据“设置”和“操作”进行评估。
3、便于升级
当挑选一个机器视觉软件时应思考系统将来的升级问题。
矩视智能是一家致力为自动化系统集成商及其工程师团队赋能,提供机器视觉低代码开发平台,坚持“0代码、0门槛、0硬件、0成本”的产品理念,全面提升机器视觉开发供给能力,推动机器视觉普惠化落地。
与其他提供定制化服务的视觉解决方案商不同,矩视智能提供标准化的机器视觉低代码协同开发平台。目前矩视拥有开发者工具平台形式的SaaS和aPaaS系列产品。
将传统PC-Based的软件形态,升级为云端SaaS形态,从而在行业内大范围积累数据,并运用数据让产品更加“傻瓜化”,方便工程师使用;由于采用PLG的增长模式,矩视选择面向视觉、软件、电气、结构等工程师,免费授权使用开发环节,进一步降低机器视觉的使用门槛,以此良性循环,扩大产品的使用人群。
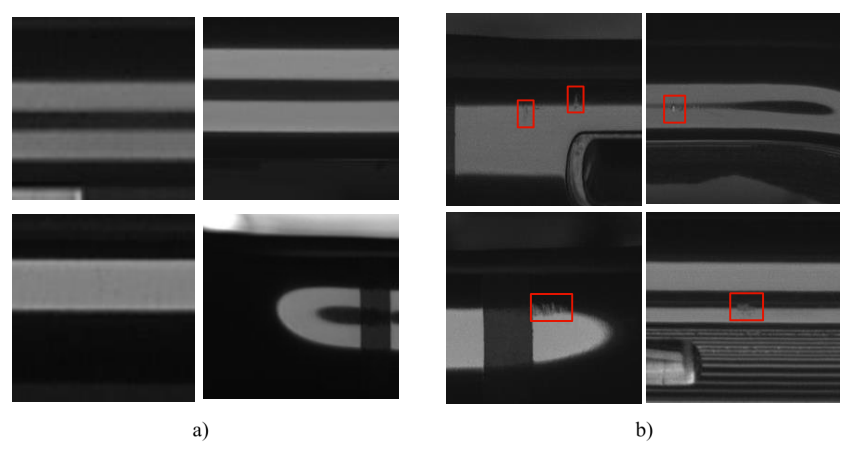
a/无缺陷图像 b/有缺陷图像
该方法可靠性高、 可扩展性强,不仅降低了产品缺陷的漏检率和废品率, 还解决了生产现场环境恶劣、 工人操作危险和实时性差等问题。